1.基本思路为两个UWB基站+陀螺仪+里程计+卡尔曼,对里程估算; 2.正在写基础文档;
定位精度 测距精度
UWB测距精度
1.已实现在标签读取基站的(各个基站间、标签位置等);2.自标定需要在基站间操作,正在研究通过标签给主基站发送一帧数据实现自标定流程;
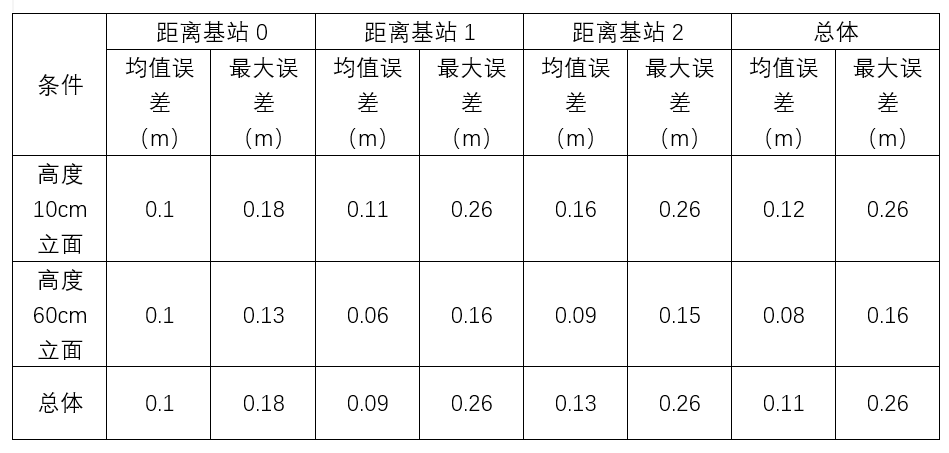
经佳宝测试: 1.两标签距离10cm,影响微小;2.需在同一平面()否则数据随高度变化;请佳宝详细补偿
将标签1放置在标签0 附近10cm位置,标签0的数据变化微小 uwb选择二维定位模式,当标签处于基站所在平面下方63cm时,定位数据变化明显
No due date set.
This issue currently doesn't have any dependencies.
Deleting a branch is permanent. It CANNOT be undone. Continue?
1.基本思路为两个UWB基站+陀螺仪+里程计+卡尔曼,对里程估算;
2.正在写基础文档;
定位精度

测距精度
UWB测距精度

1.已实现在标签读取基站的(各个基站间、标签位置等);2.自标定需要在基站间操作,正在研究通过标签给主基站发送一帧数据实现自标定流程;
经佳宝测试:
1.两标签距离10cm,影响微小;2.需在同一平面()否则数据随高度变化;请佳宝详细补偿
将标签1放置在标签0 附近10cm位置,标签0的数据变化微小
uwb选择二维定位模式,当标签处于基站所在平面下方63cm时,定位数据变化明显