No Milestone
3 Participants
Notifications
Due Date
No due date set.
Dependencies
This issue currently doesn't have any dependencies.
Loading…
Reference in new issue
There is no content yet.
Delete Branch '%!s(MISSING)'
Deleting a branch is permanent. It CANNOT be undone. Continue?
存在问题
图像问题:1.图像传输卡顿是由于硬件不同的传输协议造成的;安卓上的图像显示软件均卡顿;海康的图像软件(Windows)无明显卡顿;
可能解决方式:
1. 直接用Windows 电脑查看
2. 查看能否使用海康安卓的SDK编译安卓的软件,实现图像查看;
海生物to 【海生物】存在的问题及处理方式 1 year ago在使用MK15遥控器时,控制机器人运动,偶发失灵情况,请总结(如何诊断问题及解决方法)@BIHONGXU
1.遥控器发的错了?
2.硬件供电问题?MK15使用官方供电串口也坏了;控制项12V供电出问题;
3.加校验?
测试一下,没问题就扣盖?
@BIHONGXU 测试稳定性;
水压传感器;
前后左右转弯;
烧写程序;
测试电压电流;
@BIHONGXU 测试进度及效果?
2月20日测试情况:
空载情况下最高总功率为550W,负载50KG情况下最高总功率650W。
机器人前后左右移动正常。可以正常调整移动速度和灯光亮度。
机器人姿态数据及水深数据接收正常。
2月20日测试情况:
空载情况下最高总功率为550W,负载50KG情况下最高总功率650W。
机器人前后左右移动正常。可以正常调整移动速度和灯光亮度。
机器人姿态数据及水深数据接收正常。
500w,50Kg600w
数据记录,录像;测试情况记录
除海生物机器人更换控制器为UniRC 7,需要做的测试有: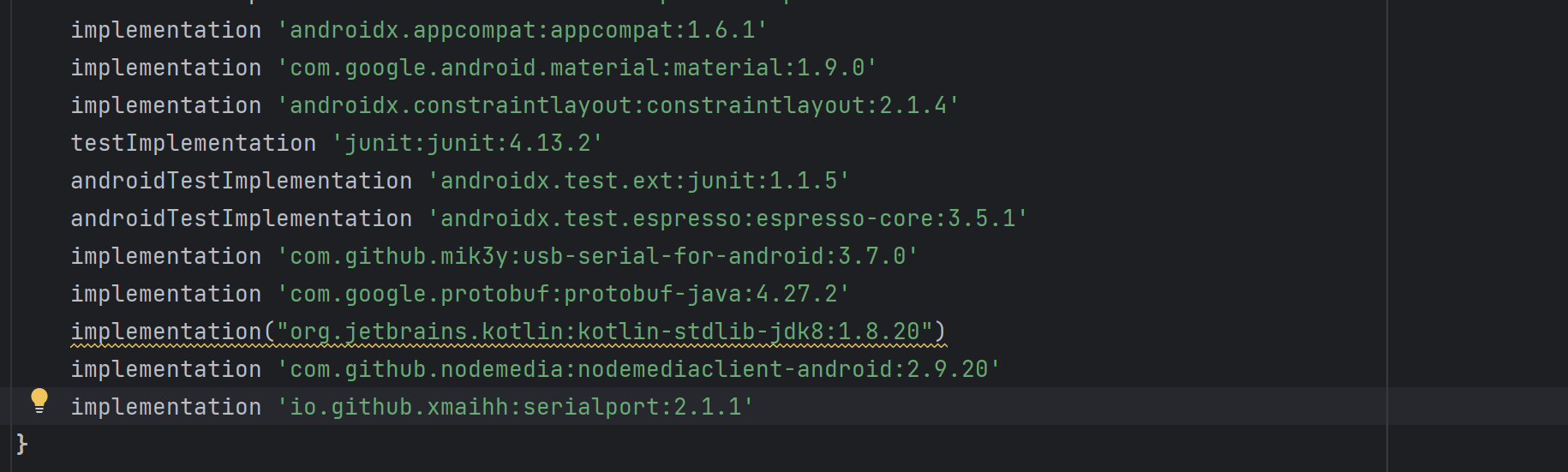
1. UR7 视频显示是否流畅?或者是否比MK32 流畅? 截止日期为: 6月5号;[比MK15性能好,但是也没有特别好]
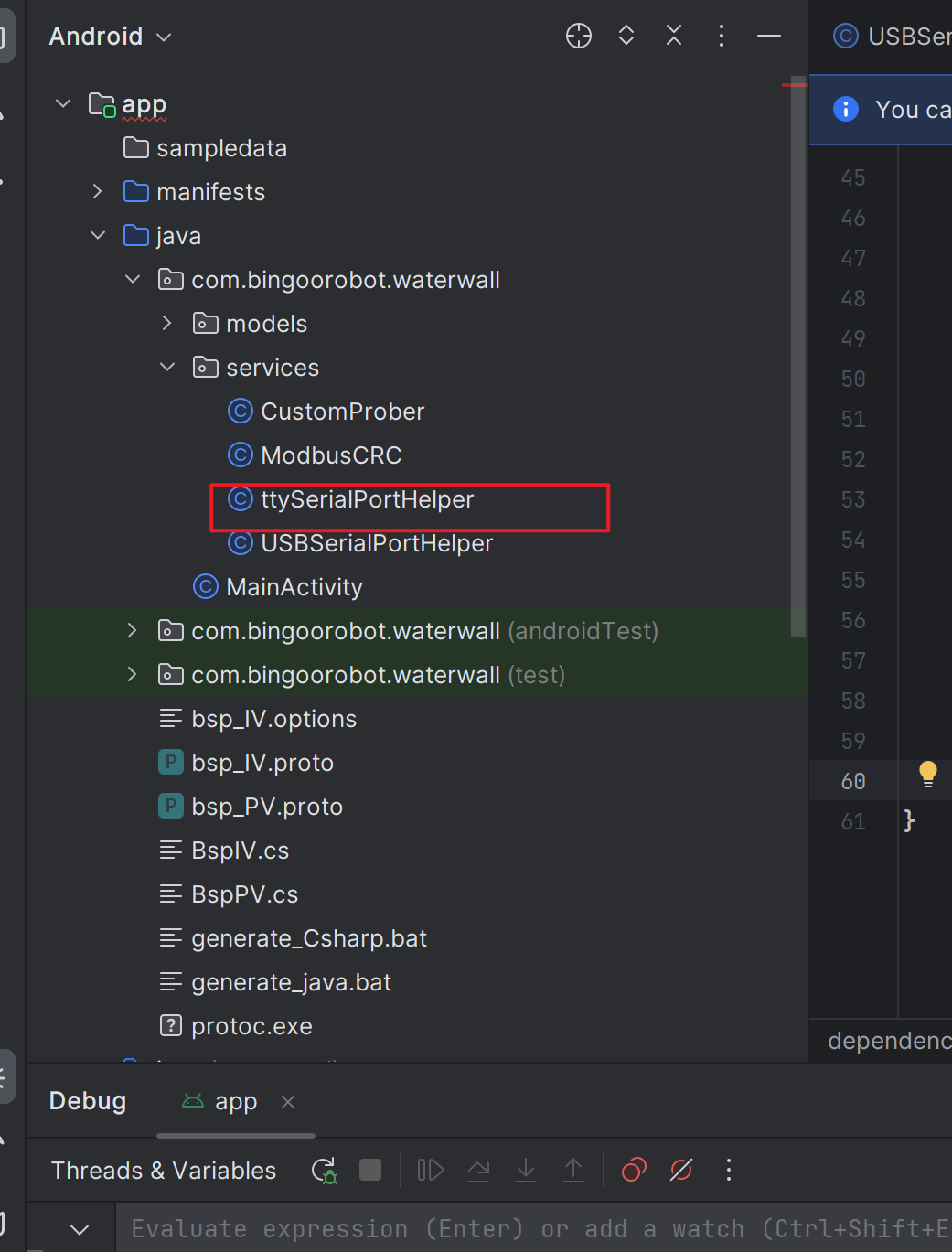
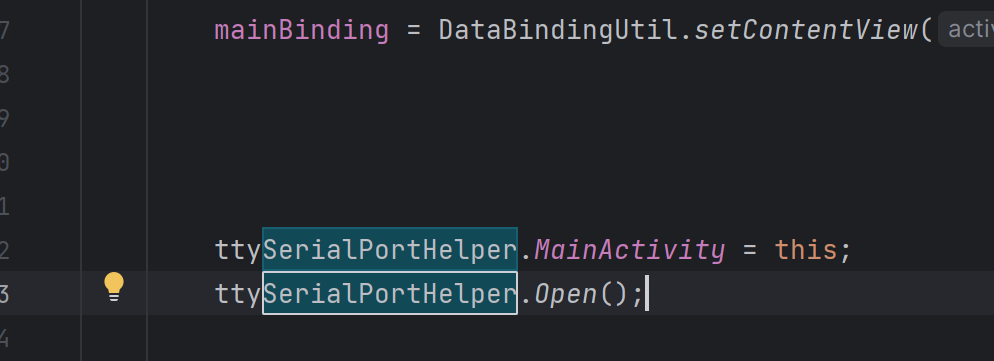
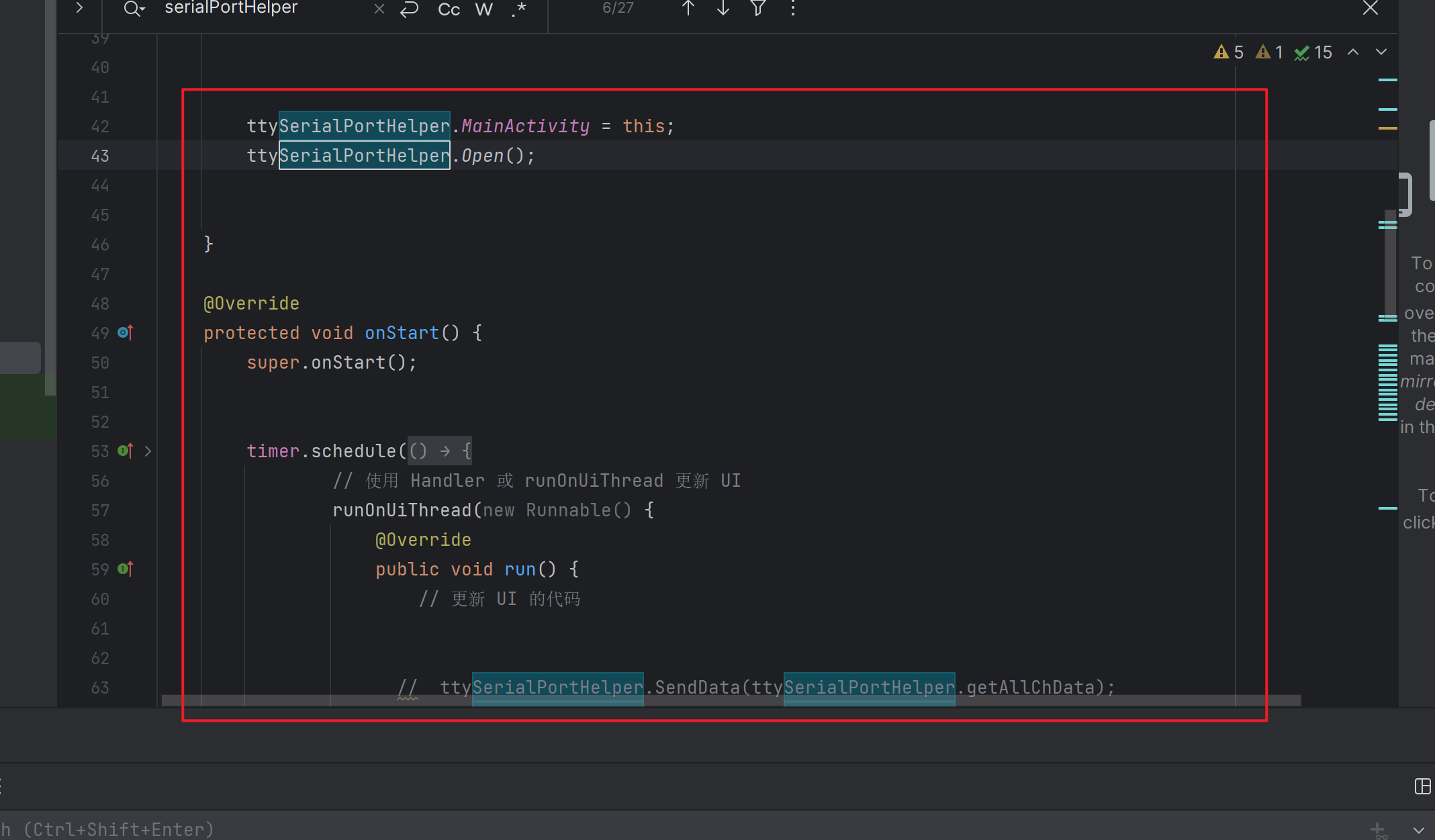
2. UR7 没有usb串口,需要调整程序,透传口更换为ttyHS3 截止日期 6月5号:
代码修改如下:
参考代码:WaterWall
【已经写完】