【1】激光远距离测试; 【2】28m/min行驶速度; 【3】
@MaRuihan 2.19测试情况
@MaRuihan 2.19测试情况 长距离水平纠偏效果不理想,已经找到原因(雷达装在车位导致),已经和超哥沟通过了,明天给机器人打几个孔,然后装在两个轮子的轴线上。
修改机械硬件; 十几米测试高度信息稳定; 根据基础参数计算一下理论偏差;
1.周一看一下情况;水平纠偏;自动作业;
1.两个视频分别是水平纠偏和自动行驶轨迹的简单演示。等周一再一起讨论一下具体情况。 2.雷达的角度分辨率为0.043°,在假设角度误差为±0.043°的前提下,做了个简单的数学模型分析,得出结论:1.当距离固定时,0-90度范围内,角度越大理论误差越大,20m处的最大误差约为3cm。2.当把角度固定时(图中为90°),距离与理论误差呈正比关系,在40m处的最大误差约为6cm。 3.在21号上午测试了一下程序启动的稳定性(20号一整天测试的时候,有一次程序启动后电机直接达到最大速度,程序卡死的情况),但是在21上午进行反复的程序起停,多种情况的实验,却始终未出现程序异常卡死的情况。
@MaRuihan 请把雷达的基本参数(截图或参数表)及计算过程(计算公式)推上来
@MaRuihan 纠偏视频中,出现以下问题: 1.安全问题,尽管悬挂安全绳,但是机器人运行过程中可能掉落,测试过程中,需要保持安全距离,尤其在机器人下方; 2.视频中纠偏的运行速度?
【2】28m/min行驶速度;
@MaRuihan
1.在正常观测到目标物的情况下,自动轨迹程序可以正常运行(反复实验,均可正常执行)。 2.关于有时候看不到目标物的情况,明天深入实验、联系厂商。
@MaRuihan 工作安排如下:1.先与王老师及厂家沟通技术问题;2.深度实验规划;3.做实验。
@MaRuihan 漆雾对雷达的影响;
上linux系统的板子
@MaRuihan 加灯测试,工艺需求; 20000sin(0.03/180pi)=10mm
20000sin(0.03/180pi)=10mm
@MaRuihan 看不到障碍物情况下,怎么解决;
暂时 搁置; 原因;1 漆雾 扬尘 【遮挡】 2. 船板 凹凸不平【识别物 需要特别长】
No due date set.
This issue currently doesn't have any dependencies.
Deleting a branch is permanent. It CANNOT be undone. Continue?
【1】激光远距离测试;
【2】28m/min行驶速度;
【3】
@MaRuihan 2.19测试情况
修改机械硬件;
十几米测试高度信息稳定;
根据基础参数计算一下理论偏差;
1.周一看一下情况;水平纠偏;自动作业;
1.两个视频分别是水平纠偏和自动行驶轨迹的简单演示。等周一再一起讨论一下具体情况。
2.雷达的角度分辨率为0.043°,在假设角度误差为±0.043°的前提下,做了个简单的数学模型分析,得出结论:1.当距离固定时,0-90度范围内,角度越大理论误差越大,20m处的最大误差约为3cm。2.当把角度固定时(图中为90°),距离与理论误差呈正比关系,在40m处的最大误差约为6cm。
3.在21号上午测试了一下程序启动的稳定性(20号一整天测试的时候,有一次程序启动后电机直接达到最大速度,程序卡死的情况),但是在21上午进行反复的程序起停,多种情况的实验,却始终未出现程序异常卡死的情况。
@MaRuihan 请把雷达的基本参数(截图或参数表)及计算过程(计算公式)推上来
@MaRuihan 纠偏视频中,出现以下问题:
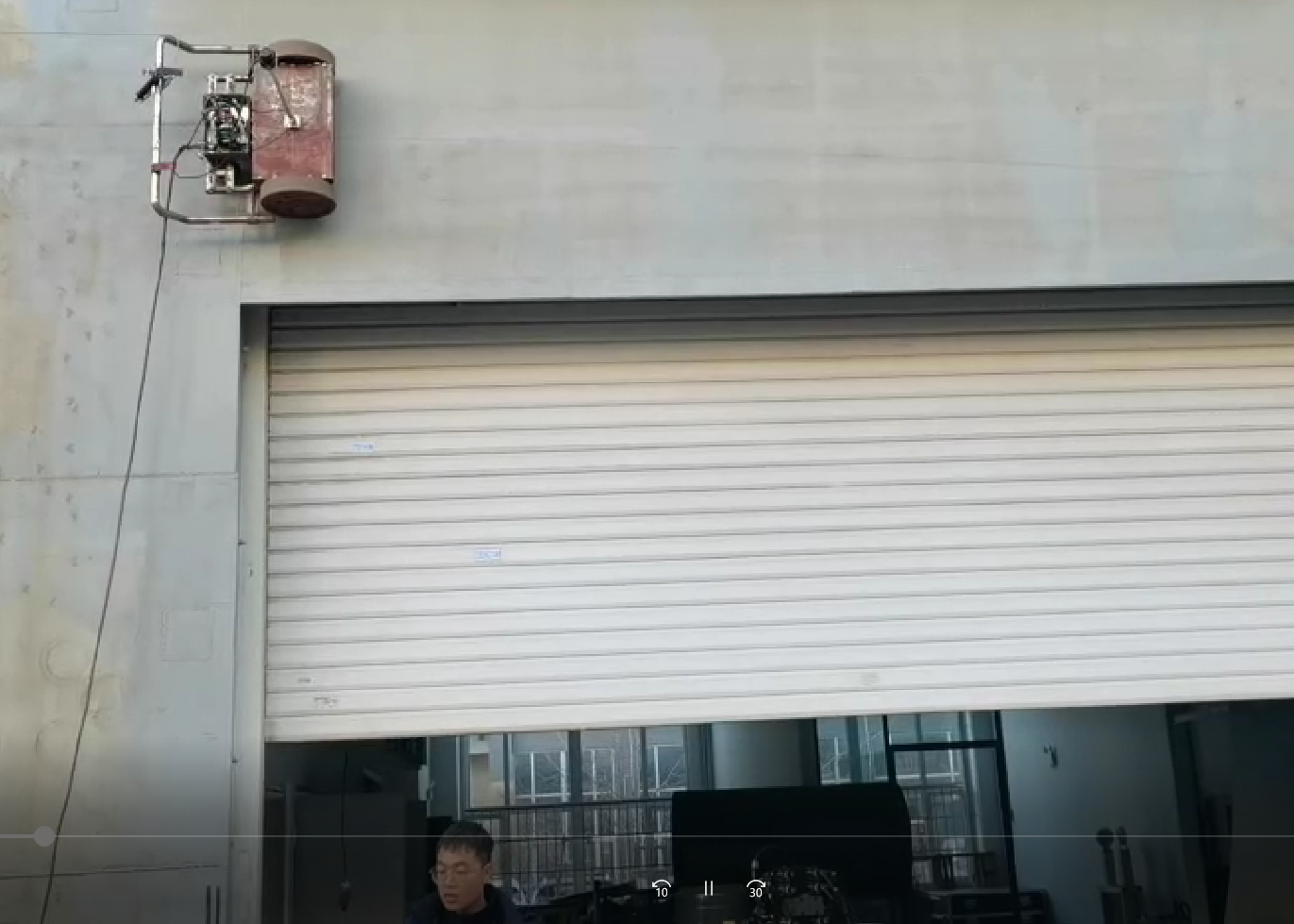
1.安全问题,尽管悬挂安全绳,但是机器人运行过程中可能掉落,测试过程中,需要保持安全距离,尤其在机器人下方;
2.视频中纠偏的运行速度?
@MaRuihan
1.在正常观测到目标物的情况下,自动轨迹程序可以正常运行(反复实验,均可正常执行)。
2.关于有时候看不到目标物的情况,明天深入实验、联系厂商。
@MaRuihan 工作安排如下:1.先与王老师及厂家沟通技术问题;2.深度实验规划;3.做实验。
@MaRuihan 漆雾对雷达的影响;
上linux系统的板子
@MaRuihan 加灯测试,工艺需求;
20000sin(0.03/180pi)=10mm
20000sin(0.03/180pi)=10mm
@MaRuihan 看不到障碍物情况下,怎么解决;
暂时 搁置;
原因;1 漆雾 扬尘 【遮挡】
2. 船板 凹凸不平【识别物 需要特别长】